Hamamatsu Micro Maker Faire 2024に出展した

初めに
Hamamatsu Micro Maker Faire 2022 で初めての展示会出展を経験してから1年半。昨年の2023は都合がつかず、ちょっと見に行った程度で終わってしまいましたが、今年は何としても出たいと思い、申し込みをしたところ見事許可下りまして、2度目のHamamatsu Micro Maker Faire出展が決まりました。
事前準備
前回出展時の自分のブログを参考に準備をしました。ブログ書いててよかった。
テーブルクロスは便利だった記憶があるので100円ショップで購入。資料をペタペタ貼って、撤収時はそのまま丸めてしまって使い捨てです。
今回いろいろ展示したかったのでスペースを増やす意味でワイヤーラックスタンドを4式分用意しました。
前日&当日準備
10時30分から出展者の受け付け開始で13時開始。前回は11時に家を出るという余裕をかましたらギリギリになった反省を活かし、10時に出発。 浜松市駅北駐車場(12Hで700円)に車を止めて10時40分に会場入り。12時に設営完了。明日のHamamatsu Micro Maker Faire 2024に向けて荷物をまとめ終わりました。とりあえず持てる作品を全て持ち込んで、その場で何を飾るか決めます。なので時間帯によって全然違う展示をしてるかもしれません。
— PikaPikaらいと (@KPmilk3) 2024年7月6日
#HamamatsuMMF2024https://t.co/oFbnBA46wj pic.twitter.com/j4QTwePsne
今回は少し余裕があったので会場前に他の人の展示を見て回り、BBコリーさんとお話しすることができました。Hamamatsu Micro Maker Faire 2024 設営完了。すでに疲れました😓
— PikaPikaらいと (@KPmilk3) 2024年7月7日
#HamamatsuMMF2024 pic.twitter.com/1RJjoQ5u2v
前から気になってたWANTED MAKERで賞金首に。
アナログテトリス楽しすぎる!@KPmilk3 pic.twitter.com/dhiAp8meUU
— BBコリー✂︎ (@BitBlt_Korry) 2024年7月7日
各作品の反響
「立方体万華鏡×LEDテープ」
protopedia.net
前回の反省を活かし、「ハコの中をのぞいてみてね」と書いておいたので自然とみてくれる方が多かったです。
 のぞいた瞬間「すごい」と言ってくれた人が体感だと100人くらい、実際は30人くらいいました。
のぞいた瞬間「すごい」と言ってくれた人が体感だと100人くらい、実際は30人くらいいました。
机に背が届かないくらい小さい子もみようとしてくれていたので、手持ちができる形に改良したいと思います。
「LEDパネルで落ちゲー」
protopedia.net
元々はパネルを上下に振ることでブロックの回転動作をする仕様だったのですが、これが非常に疲れるし難易度が高い。前回の経験から小さいお子さんが多く来場する事を想定し、回転動作はボタンを押すように変更しました。
テ〇リスなんて小さい子は知らないんじゃないかと思いきや、小学生以上くらいの子はみんな知っているようで思った以上の人気ぶりでした。30分くらいプレイし続けてお母さんにあきれられた子もいました。
「ホッピングLED」
protopedia.net 今回の展示のメインになると思い、2個作成しました。ひとつはM5StackCore2を使って、枠にあたるとドレミファソラシドの音がでるモードを追加したのですが…
会場で試したところ周りの雑音にかき消されて音が全く聞こえない。泣く泣くこのモードはあきらめて、単純に傾けると動くモードで勝負しました。 アマゾンで買った薄いモバイルバッテリーでコンパクトにすることが出来て、とても多くの人に体験してもらうことできました。M5StackCore2を使ってホッピングLEDパネルを改良してドレミファソラシドが出るモードを追加してみました。(音あり動画)https://t.co/nxZbuhNeBp pic.twitter.com/B9g4UF8axl
— PikaPikaらいと (@KPmilk3) 2024年6月18日
「ドデカ7セグユニット」
protopedia.net
元は単なる表示機だったのですが出展にあたってスロットマシーンに改良しました。 100円ショップで購入したプッシュライトをボタンに改造してGroveケーブルの余っていたピン(一つはLEDの制御で使用)を使って割り込み処理することで目押し可能なスロットマシーンを作り上げました。揃ったらちょっとした景品を出すようにしたいと前日に思いつき、100円ショップをうろうろして蓄光石なるものを発見。景品効果か、ハマる子はハマってしまって何度も何度も777にチャレンジを繰り返す姿が見られました。子供はなかなかタイミング合わせるのが難しいようでしたがお父さんたちはみな上手でした。目押しやってたのかな。
100円ショップで購入したプッシュライトをボタンに改造してGroveケーブルの余っていたピン(一つはLEDの制御で使用)を使って割り込み処理することで目押し可能なスロットマシーンを作り上げました。揃ったらちょっとした景品を出すようにしたいと前日に思いつき、100円ショップをうろうろして蓄光石なるものを発見。景品効果か、ハマる子はハマってしまって何度も何度も777にチャレンジを繰り返す姿が見られました。子供はなかなかタイミング合わせるのが難しいようでしたがお父さんたちはみな上手でした。目押しやってたのかな。
「LEDテープで色変わりの刀」
protopedia.net 実はこの作品が私のピカピカ工作の最初の作品で、一度は人に見せたいと思い展示してみました。 電源入れるたびにランダムで色が変わるようになっていて、「自分の色は何色かな」といううたい文句で割と子供たちにウケました。実は赤色が出る確率を他の色より低めにしていたのですがそのことをすっかり忘れていました。もし今後展示することがあれば赤色がレアという設定を加えて射幸心をあおりたいと思います。
「Infinite Mirror x LEDパネル」
protopedia.net 今回のテーブル位置がちょうど会場の入り口から目につくところだったので、アピール用で設置しました。 どういう仕組みか気になる方も多く、顔を近づけて見入ってくれる方もいました。作品紹介のQRコードが活躍してました。
「LEDテープでCrazy Circle Illusion」
protopedia.net
これもアピール用で会場入り口から見える場所に飾りました。配線むき出し状態だったのですが平気で触って来る元気なお子様がいたりしてひやひやしました。
このプログラムはなかなかすごそうですね、という感想をいただいたのがうれしかったです。そうなんです、動きのイメージをプログラムに落とし込むのは大変なのですが思い通りのものができるとすごくうれしいのです。
「アノマロカリス ロボ」
protopedia.net こいつもどうしても人に見てもらいたいと思い、隅っこにひっそり設置しておきました。そしたら意外と「アノマノカリス」の認知度が高かったです。手に取って動かしてみてくれる方も多く、好評だったと思います。3Dデータを公開していると言ったらQRコードを読み取ってくれた学生らしきお兄さんがいたんですが彼は果たして作ってくれたのだろうか。
展示中の出来事
バスコンパスさんにお声がけいただき、初めてお話しすることができました。「これどうやってLEDを拡散させてるんですか?」こういう質問を待ち望んでいたんですよ。
ピカピカライトさんと初めて直接お話しできた!
— パスコンパス (@pscmps) 2024年7月7日
半紙で拡散していてm5atomで角速度、加速度からブロックの位置を算出
応答性が早くて気持ちがいい!#HamamatsuMMF2024 pic.twitter.com/5bfXRcHHX1
なんと、からあげ先生にもお声がけいただきました。認知されていることに感謝感激です。
Seeedのブースでお手伝いをされていたそうです。全然気づかなかった。
karaage.hatenadiary.jp加速度センサで動かすLEDマトリクス。手触わり感が良いですね #HamamatsuMMF2024 pic.twitter.com/mAhfplbpJ8
— からあげ (@karaage0703) 2024年7月8日
展示できなかった作品
#HamamatsuMMF2024
— PikaPikaらいと (@KPmilk3) 2024年7月8日
実はこのドット絵カメラも用意していたのですがスペースが足りなくて展示しそびれました。明るい場所だと見にくいという問題もあるので改善していつか展示できればと思います。
供養の動画公開。 pic.twitter.com/O7rLXkU4rH
感想
今回、前回以上に来場者多かったと思います。多くの人に現物の作品を見ていただけて、生の感想を聞くことが出来て非常に励みになりました。SNSのコメントもうれしいですがやはりリアル展示で感想をもらえるのは格別です。
欲張ってたくさんの作品を展示したので席を外す暇が全くなく、他の展示をほとんど見れなかったことだけが残念でした。
謝意
非常に貴重な経験でした。関係者の皆様ありがとうございました。 いつの日かMaker Faire Tokyoに出れるくらいの作品を生み出せるよう精進します。
Maker Faire Tokyo 2023見学レポ
2023/10/15(日)Maker Faire Tokyo 2023を見学してきました。
興奮冷めやらぬうちに写真中心のレポを残します。
前日、急に行けることになったので慌てて準備。
スタックチャンを持ち込んで記念撮影できると聞いていたので、自作のスタックチャンフラワーを引っ張り出したらサーボの配線部分が完全に故障していて、必死に直そうとするも結局ちゃんと動かず。ピカピカ機構は生きていたのでなんとか見せられるかと思い、持っていくことに。
#MFTokyo2023
— PikaPikaらいと (@KPmilk3) 2023年10月14日
なんとか明日行ける事になりました。念のため少しだけ作品持参します。#スタックチャン 持ち込みしようと思ったら色々と故障してたので修理中。 pic.twitter.com/Zyl0uMMWZ5
ビッグサイトに到着。寒い。
— PikaPikaらいと (@KPmilk3) 2023年10月15日
今までに20回以上は来ていると思うが、自費で来たのは初めて😅 pic.twitter.com/3TOcnxA5NO
水色のProtoPediaティーシャツに背中にうちわ花火姿でうろうろしていたのが私です。
このカッコで会場をウロウロしていたのが私です。普段なら絶対出来ませんが、この場では違和感なかったかと。
— PikaPikaらいと (@KPmilk3) 2023年10月15日
LED花火プラットフォーム的なものが作れたらいいなとちょっと考えてます。#MFTokyo2023 https://t.co/Ghh9C7IMps
まず会場に入ってすぐのところでヒゲキタさんのプラネタリウムがちょうど始まるところでした。ラッキー。
ツイッターで実物見ないとすごさが分からないとのコメントを多く見ていたので期待していましたが、期待以上にすごかったです。シンウルトラマンがツボでした。

持ち込んだスタックチャンで記念撮影。
スタックチャン産みの親のししかわさんにもご挨拶できました。
 すごい数のスタックチャンに囲まれるの図
すごい数のスタックチャンに囲まれるの図

小林竜太さんにご挨拶できました。
展示作品どれもかわいい。自宅の3Dプリンタで作成しているとのことでしたが、すごくきれい。
 著書にサインをもらいました。
著書にサインをもらいました。

接点事務所さんのウオォォラコースター
LEDテープで作ったジェットコースターですが、マイクが仕込んであって大きな音を出すとスピードアップする仕組み。
LEDテープでジェットコースターというアイデアは自分も考えたことあっていつか作ろうと思っていたのですが、音でコントロールさせるという発想はなかった。こういうインタラクティブ性が自分の作品には不足していると感じているので、見習いたい。

福山大学のMakers さんのシン3次元表示装置
LEDテープ75ピクセルx16本x8本= LED 9600個を8台のRaspberryPiで制御している。この力業感がすごい。

手作り感あふれる6x6x6のLEDキューブ。LEDキューブを手作りした人は無条件で尊敬します。

Kotomania
実物を見れて感激。お琴にプロジェクションマッピングして太鼓の達人的なゲームにしてしまうという傑作。スコアが出る機能が搭載されていることを知りました。どうやって検知しているのかと思ったら柱のところにピエゾセンサがついていてそれで検知している様子。すごい。

音楽研究所さんのロボットバンド NEO
こちらも初めて実物みれました。めっちゃピカピカしてました。

neonさん
8x8のLEDパネルを6面使ったLED CUBEとモーションセンサを使って、どんなに動かしてもLEDの位置が変わらないというガジェット。かなり早く動かしても追従していていてすごかった。

ひらめき空と月
なんと「FlashAir同窓会」と題した同人誌を無料配布していました。今は無きFlashAirですが、5年ほど前によく使っていました。SDカードなのにWi-Fiが使えてWebサーバーにもなり、Lua言語で簡易なバッチ処理までできるというとんでもないカード。
ちょうどIoTでなんかやれと言われていた時期だったので、これを使ってセンサのデータをスマホで見れるWEBアプリを作ったりしてました。今でもESP32使って同じようなことしたりしてます。

無駄な抵抗コースター買いました。1個100円。買うでしょ。

はんだ修理ピットがすごくいい感じでした。
#MFTokyo2023
— PikaPikaらいと (@KPmilk3) 2023年10月15日
白光さんのハンダ修理ピット。
ハンダごて、ハンダ、吸いとり線、フラックス、ワイヤーストリッパー、ニッパー、ピンセットが完備されていた。素敵。 pic.twitter.com/QaeBK8dd7F
マウザーブースにてProtoPediaの中の人、まなみんさん、ひげだるまさん、ばんのーさんに初めてお会いすることが出来ました。youtubeでしょっちゅう見ているので芸能人に会った感覚。
ヒーローズ・リーグ 2021でProtoPedia賞をいただいた立方体万華鏡×LEDテープを持参していたので、お見せすることできました。ひげメガネ✖️2と一緒に@about40man @masaya3 pic.twitter.com/vyIjLdQsHA
— 鈴木まなみ♨️MFT SP03-05 (@Rin2tree) 2023年10月16日
展示品じゃなく、持ち込み作品
— 鈴木まなみ♨️MFT SP03-05 (@Rin2tree) 2023年10月15日
綺麗だった。 pic.twitter.com/aa3Ca2lnir
airpocketさんにも初めてお会いすることできました。 メカニカルディスプレイは修理中で動くとこは見れませんでした。残念。
#MFTokyo2023
— ProtoPedia|MFT2023はSP03-05にいるよ (@ProtoPedianet) 2023年10月14日
朝イチなら動く!
【SP03-05】 pic.twitter.com/NZHpge5LSW
TakSanさんにも初めてお会いすることできました。球形のLEDキューブを作られていて、これはハード、ソフトともに凄すぎる。ご挨拶させていただいたところ、なんと球形LEDキューブ基板をの基板一式をいただいてしまいました。これは作るしかないでしょう。まずはWS2812Bのチップを買うところから始めます。(普段はLEDテープを使っているのでチップを買うのは初めて)
@TakSan0 さんより球体LEDの生基板をいだだきました。ありがとうございます。話し込んでしまって作品の写真撮り忘れてしまいました。
— PikaPikaらいと (@KPmilk3) 2023年10月15日
LED工作者としては完成させて新しい何かを加えられればと思います。#MFTokyo2023 https://t.co/ytPqQcgoLJ
Jimmyさんには遭遇できず。。同じ会場にいたはずなのに悔しい。
 同じく会場にいらしたはずのからあげ先生にも遭遇できず。もしお会い出来たらサインもらおうと思って著書もっていったのですが。。
同じく会場にいらしたはずのからあげ先生にも遭遇できず。もしお会い出来たらサインもらおうと思って著書もっていったのですが。。
とり子さん、youさん、パスコンパスさんも会場にいらしたことを後から知りました。ご挨拶できず残念。
金本さん、高須さん、ギャル電さん、らびあんさん、Niiさんはお見かけしましたが、畏れ多くて声かけられず。
最後に
初めてのMaker Faire Tokyo 見学、予想以上にすごい作品ばかりでした。洗練された作品もあればすごい力技で作られた作品もあって楽しすぎる。いつかは自分もMaker Faire Tokyo に出展できたらと思っていましたが、これはそう簡単なことではないと実感できました。なんというか作品の深みというか情熱というか狂気というか愛というか、そういったパッションを持った作品でないとこの場には立てないんだな、と。
それでもいつの日かここに出たいとの決意もしました。
玄関のカギ監視システムを作って2年経ちました
初めに
2年前のGWに玄関のカギ監視のIoTシステムを作りました。 pikapikalight.hatenadiary.com 1年後の2022年に振り返りをしてみました。 pikapikalight.hatenadiary.com そして2年たった今現在、一度も電池交換することなく玄関カギのIoTを実現できています。 正直ここまで電池持つとは思ってませんでした。TWELITE CUE素晴らしい。
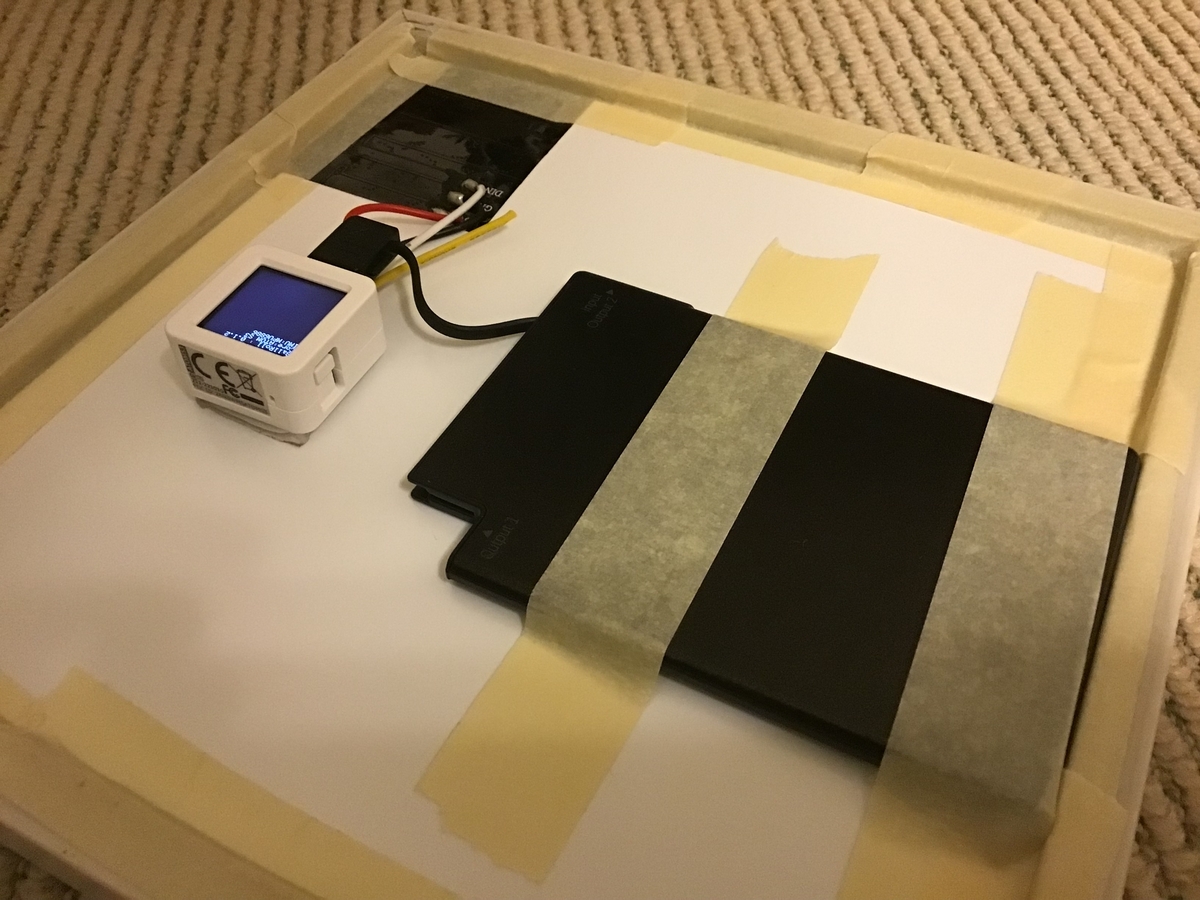
電池残量
カギ監視のキーデバイスはモノワイヤレスのTWELITE CUEを使用しています。玄関のカギに磁石をセロテープでつけてTWELITE CUEに内蔵されている磁気センサで開閉を検知する仕組みです。コイン電池 CR2032 で動きます。
標準のソフトで電源の電圧値も取得できるようになっていたのでそれも記録していました。
2年間の結果がこちらです。
 ウチの玄関のカギは2個ついているので2個センサーをつけていて、上側がD1、下側がD2です。
ウチの玄関のカギは2個ついているので2個センサーをつけていて、上側がD1、下側がD2です。
気温と相関ありそうなデータが取れました。2年間問題なく動いていた実績も感慨深いです。
2年経って2.4V程度まで落ちましたがまだちゃんと動いています。
このシステムは開閉を検知した時と定期的に1分に1回の通信をしています。モノワイヤレスのHPによると「1分に1度の定期送信のみの場合、約700日」と記載あります、その通りに2年間1分間隔で動き切りました。素晴らしいです。
感想
玄関のカギ状態監視IoTは自分のような心配性人間(カギかけたっけ症候群)にとって間違いなく有用ですし、子供がちゃんと予定通りに時間に家に帰ってきているのかを確認できるという使い方もあります。個人で実用的なモノを作ったのはこれくらいですが、これは頑張って作ってよかったと思える代物です。
初めてのAliExpress

初めに
昨年末の話ですがクリスマス向けの工作でLEDドット絵クリスマスツリーを作りました。
Dot Xmas tree 🎄made with M5Atom and LED tape@M5Stack#M5StackXmas2022 pic.twitter.com/pIfCwXGGO5
— PikaPikaらいと (@KPmilk3) 2022年12月22日
作っている途中で使用しているLEDテープ(100LEDS/m)が不足する事態に。
LEDテープはたくさん手持ちが有ったので油断してました。持っているのは144LEDS/mサイズのものがほとんどで100LEDS/mがないことに気づかなかった。 100LEDS/mというサイズは1つのドットがちょうど1センチ角になります。他のサイズのテープではドットが長方形になってしまうので、100LEDS/mというサイズが必要なのです。 買い足そうとするもどこも在庫なしで、泣く泣く過去作品をばらして部品取りするということをしました。クリスマス向けの工作中。
— PikaPikaらいと (@KPmilk3) 2022年12月15日
はたして間に合うか😓 pic.twitter.com/ZJuZDR4fZ5
クリスマス向けの工作中。
— PikaPikaらいと (@KPmilk3) 2022年12月19日
途中でLEDテープ(100個/1m)の手持ちが足りなくなって、買い足そうにも何処にも在庫無し😩泣く泣く過去作品をバラして何とかハードは完成。
後はソフトを作りこまねば。M5Stack Christmas Contestに間に合うか😵💫 pic.twitter.com/KN0MNIbq3x
その後も100LEDS/mというサイズのLEDテープは国内の通販サイトでは見つからず、
もしかすると2度と入手できないかも。
ドット絵工作はネタを思いついたらやりたくなるので何とか入手したい。
探索範囲を広げるとAliExpressのBTF-LIGHTING Official Storeで購入できる事が分かり、 AliExpressに初挑戦することとなりました。
事前調査
日本では入手難しそうな電子部品をAliExpressで輸入している投稿をツイッターでよく見かけていました。なかなか届かない荷物を待ちわびるイメージです。
AliExpressが中国のアリババの通販サイトであることはなんとなく知っていましたが輸入という未知の響きに今まで手を出すことはありませんでした。
やはりクレジットカードの登録に躊躇してしまいます。支払方法に関してネットでざっくり調べてみて、Vプリカというプリペイド式のVISAカードを使うこととしました。
Vプリカ
コンビニで買えるとのことなので近所のローソンで購入しました。Loppiでなんとなくそれっぽいボタンを押していったら無事Vプリカの画面にたどり着きました。
2000円から10000円まで選べますが5000円までは手数料が200円だったので5000円にしました。いきなり1万円は突っ込めない小心者です。
発券して、レジでお金を払うと番号が書かれたレシートを渡されました。5200円と引き換えになったレシートの感熱紙のペラペラ感に一抹の不安を感じる安定の小心者。
スマホアプリをインストールしてカードを登録していきます。最初にアカウント登録する必要ありました。アカウント増えるの嫌ですが仕方なし。
後から知りましたがアカウント開設不要のVプリカギフトなるものもあるみたいなのでそっちのほうが楽だったのかもしれません。
アカウント登録、カード登録自体はサクサク進んで無事カードが使えるようになりました。
AliExpress
うわさでは聞いていましたがAliExpress安いです。異常な安さのモノも多数。
狙いの100LEDS/m LEDテープは1個1185円でした。しかも送料無料。中国からの輸入なのにどうなってるの。
ここは5000円を使い切るために4個買い溜めをすることにしました。
まずはアカウント登録しなきゃと思いきやGoogleやTwitterなどの連携が出来るではないですか。アカウント増やしたくない人なのでGoogleアカウントでログインしました。
トラブル発生
カード有効期限を入力する段でトラブル発生。Vプリカアプリ画面のカードのデザイン色が濃い青でちょうど有効期限のところが濃紺で黒文字が判読できない。
 画面の拡大もできないしでどうしようかと思いましたがVプリカの有効期限は1年らしいので12月/23年だろうと判断しました。決済できたので正解だったようです。
Vプリカのカードのデザインはベーシックな青のやつとブタ?のキャラのやつの2つから選べたのですが、もしまた使うことがあればブタにしようと心に刻みました。
画面の拡大もできないしでどうしようかと思いましたがVプリカの有効期限は1年らしいので12月/23年だろうと判断しました。決済できたので正解だったようです。
Vプリカのカードのデザインはベーシックな青のやつとブタ?のキャラのやつの2つから選べたのですが、もしまた使うことがあればブタにしようと心に刻みました。
カード名義を入力する際にもトラブル発生。 Vプリカは本名でなくニックネーム(ここでは仮にABCDE)がカード名義になるのですが、購入画面でABCDEと入れると「姓と名の間はスペース区切り」というエラーメッセージが出て入力できません。なんてこったスペース入れないといけなかったのかと思い、ニックネームの再登録ができないか調べるも、出来なさそう。これは詰んだかと思いましたが、ダメもとで適当にスペース入れてやれと A BCDE ですすめたら無事決済できました。
あとで知りましたがそもそもVプリカのニックネームにスペースは入れられない仕様でした。 そしてFAQにまさにこの問題の対応方法が載ってました。自分の方法は正しかったようです。 vpc.lifecard.co.jp
トラブルを乗り越えて無事購入手続きできました。手続き完了のメールも日本語で届きました。 この日が2022/12/27。到着予定は2023/1/20です。
100LEDS/mのLEDテープがどこにも売ってないので、とうとうアリエクに手を出した。
— PikaPikaらいと (@KPmilk3) 2022年12月27日
今日注文して1/20着予定。はたしてどうなるか😑
到着
輸送状況について逐一メールが届きます。2023/1/3に通関手続き完了のメールが来て、翌1/4には日本に届いたとのメールが。では明日あさってくらいに届くなと思っていたら、なんとその日のうちに荷物が届きました。12/27に注文してから8日目です。思ってたよりめちゃめちゃ早かった。
AliExpressで12/27に注文したブツがもう届いた。正月を挟んでたのに8日間で届くとはスゴい😮 pic.twitter.com/gbaHCQKUIp
— PikaPikaらいと (@KPmilk3) 2023年1月4日
結び
初めてのAliExpressショッピングは無事成功して、LEDテープ(100LEDS/m)を入手することができました。 今回のようにAliExpressでないと買えないものを買うためには今後も使うと思います。
ここ数年、ツイッターを始め、はてなブログを始め、ヒーローズリーグに参加し、Micro Maker Faire に出展しと色々な新しいことにチャレンジしてきて、世界がどんどん広がる楽しさを味わっています。
今年も新しいことにチャレンジする一年を目指します。
この先チャレンジしたいこと
・オリジナルの基板を作る
・githubをちゃんと使える人になる
・ふるさと納税
・そのことをブログで書く
Hamamatsu Micro Maker Faire 2022に出展した

初めに
LEDテープを使用した電子工作作品を作ってツイッターで公開する事を始めて約2年。やっていることはMekarと言ってもよさそうです。MakerたるものMaker Faireに出展することは憧れです。
地元である浜松でMicro Maker Faireが開催されるとあっては黙っていられません。
makezine.jp
開催日時は2022年 11月5日(土)13:00-17:00
場所は浜松科学館 (ウチから車で15分くらい)
休日も何かと忙しい身である私(主に子供の塾や習い事の送迎)ですが、これなら参加できそうです。
思い切って参加申し込みしたところ、無事に承認されました。
申し込み
作品の写真のリンクや説明を記載する必要がありましたが、ProtoPediaに作品登録していたおかげて簡単に書き上げることできました。
PikaPikaらいと | ProtoPedia
展示作品ですが、「立方体万華鏡×LEDテープ」は出すとして、他をどうしようかちょっと悩みました。私の作品はほとんど光ものなので明るい環境だとよく見えないという弱点があります。しかしやはり実物を見てもらいたいので「LEDテープでおウチ花火」、「虹を投影する懐中電灯」、「ドレミえ~る」を出すということで申し込みをしました。
申し込みをした後、メールの返信が来るはずだったのですがなかなか来ない。と思っていたら、なんと迷惑メールに振り分けられていました。そのままにしてたら承認メールにも気付かないところでした。危なかった。
事前準備
Makerの展示会に出展するのは初めてですし、見に行ったこともほとんどありません。展示物の準備はいいとして、他に何を用意したらいいものか。そんな時に頼りになったのはやっぱりからあげ先生のブログでした。ありがたや。 karaage.hatenadiary.jp
学んだ事
- 必要なものをリストアップしておく。
工具や文具、デジカメなど意外と当日忘れやすいのでリストでチェック。 - 名刺があるとGood → 今回結局準備できなかったですが、あったほうがよかったと思いました。
- 説明資料を用意する。SNS OK,写真OKを明記する。
今回の会場は電源が基本的にない(希望者のみ)という厳しい環境です。作品すべてモバイルバッテリーで4時間動作させる必要があります。とりあえず手持ちのバッテリーをかき集め、さらに大きめのもの一つ購入、さらに乾電池式のモバイルバッテリーを一台購入し、乾電池を20個ほど用意しました。
説明資料はパワーポイントで作成し、ProtoPediaの作品リンクのQRコードを入れておきました。QRコード作成はこちらのサイトを使わせていただきました。
m.qrqrq.com
プリントを机に直貼りするのはよくないと思い100円ショップでテーブルクロスを購入。
撤収時に資料をはがす必要なくそのまま片付け出来て良かったです。
当日準備
11時から出展者の受け付け開始で13時開始。1時間もあれば準備できると思い、11時に家を出るという余裕をかましたら浜松市駅北駐車場が思ったより混んでいて時間を取られてしまい11時40分に会場到着。そこから必死で設営して12時40分でなんとか完了。焦りました。初心者が余裕かますのはダメですね。他の出展者さんの展示を見る余裕もなく始まってしまいました。
#HamamatsuMMF2022
— PikaPikaらいと (@KPmilk3) 2022年11月5日
ギリギリで設営完了。
バッテリー最後までもつか😅 pic.twitter.com/W42VW1oWV1
服は目立つように、昨年のヒーローズリーグでいただいたProtoPedia賞の副賞のProtoPedia Tシャツを着ていきました。実はM5Stack Tシャツとどっちにしようか迷っていたのですが、自分のブースの真正面がSeeedさんのブースだったのでM5Stackは自粛しました^^;
行く前にProtoPedia Tシャツ来てる姿をツイッターに載せるつもりが余裕なくて出来ませんでしたが、来場者のツイッター投稿でProtoPedia Tシャツ来てる私がバッチリ写っていて、ProtoPedia の中の人に気付いてもらえました。
Tシャツきてくれてて嬉しい!
— ProtoPedia@ハッカソン運営・応援キャンペーン開催中 (@ProtoPedianet) 2022年11月5日
各作品の反響
「立方体万華鏡×LEDテープ」
protopedia.net 一番リアクションあったのはこれでした。のぞいた瞬間「すごい」と言ってくれる方が多かったです。(体感だと100人くらい、実際は30人くらいかな) どういう仕組みか聞いて来られる方も多く、その都度説明をしました。掲示資料にはQRコードを載せてここを見てねしか書いてなかったのですが、もう少し詳しく書いてもよかったと思いました。 説明資料のQRコードを撮影して、自分でも作ってみようという方も何人かおられ、展示した甲斐がありました。 反省点としては、パッと見はただの箱なので「穴のところを覗いてみてください」と声掛けしないとなかなか見てもらえないということが分かりました。もし今度これを展示する機会があれば穴のところに「ここ覗いてみて」とポップを貼っておこうと思います。
立方体のLED万華鏡が凄すぎる@KPmilk3 の作品#HamamatsuMMF2022 pic.twitter.com/atZDCEVXBH
— R-MONO Lab (@r_mono_lab) 2022年11月5日
マイクロメイカーフェア浜松@KPmilk3 さんの作品
— PONDA (@PONDA_make) 2022年11月5日
やはりLEDでピカピカしているのはいいなぁ(^^) pic.twitter.com/NCQldD8B5o
「虹を投影する懐中電灯」
protopedia.net
子供受けが良かったです。
明るい会場なので、はっきり見せるのが難しかったですが、白いボードを用意してそれなりに虹が見えるようにしたのが正解でした。
にじをがったい!🌈🌈
— ちはや☻ギターぼうず (@Chihaya188Gt) 2022年11月5日
りったいまんげきょうもすごいきれいだった@KPmilk3 pic.twitter.com/3FRnSMRsmb
浜松科学館の館員のかたも熱心に見てくれました。中身を見せただけでピンホールカメラだと理解され、上下が逆に投影されることをすぐに気付かれました。さすがです。虹を投影する機械。プリズムとか回折格子かなとおもったら全然ちがって、レインボーカラーのLEDテープの前にスリットを置いただけ。スリットが無いと色が混ざってしまい白色になってしまう。 #HamamatsuMMF2022 pic.twitter.com/Qd7qZTOAEq
— まえこっかくのSUZUKIさん💉💉💉💉 (@create_clock) 2022年11月5日
「LEDテープでおウチ花火」
protopedia.net
会場の入り口の近くの机だったので来場者はすぐにこれが目に入ったはずですが、やはり明るい場所では見えずらかったためか、花火を表現していることに気付かれない方も多かったです。
バッテリー節約のためLEDのパワーを小さくしていたのですが、もっと明るくすればよかった。
「ドレミえ~る」
protopedia.net
おもちゃのピアノを用意していたので、子供の食いつきはよかったです。ただ小さいお子様の場合はドレミが光っていることなどお構いなしで単純にピアノを楽しんでました。
M5StickC内臓マイクを使っているので、周りの声などを拾ってしまって、すぐ全体が真っ赤になってしまうという弱点も分かりました。展示会に出すには表示スケールの自動調整機能が必要です。今後の検討課題です。
展示中の出来事
これまで身バレしないようにツイッターなどをやっていましたが、地元でリアル展示ということで、知り合いが来るかもと覚悟していました。そしたら閉場間際で「〇〇さんですよね」との声が。以前仕事でお世話になった大学の先生に見つかりました。初めての身バレですが信頼できる方なので問題なしです。来年は自分も出展したいと意欲を見せてましたのでライバル登場です。
展示中はツイッターを見る余裕もなく、終わった後で確認したところ、衝撃の事実が。
なんと、からあげ先生がご家族で来場していたではありませんか。
karaage.hatenadiary.jp
しかも動画を見るとお嬢様が「ドレミえ~る」を試されているし、奥様とおぼしき「カタツムリかわいい」の声、さらに「立方体万華鏡×LEDテープ」も撮影してくださっている。
間違いなく会話していると思うのですが、お顔など全く覚えていません。なんてこった。
全体の感想
Maker Faireで面白いのは世界で1台しかない装置が大集合しているところですね。「よく作ったなこれ」って作品を見ると自分はまだまだだなと思い知らされ、逆にやる気につながります。
今回、初めての展示会出展で、初めてリアルいいねを体験することができました。 ツイッターのいいねもうれしいですが、リアルでのいいねは何よりうれしいものでした。
今回、自分の展示でいっぱいいっぱいで他の方のブースを見て回る余裕がほとんどなく、せっかくMakerの方と直接お話しできる機会だったのにもったいないことをしました。来年リベンジしたいです。
MicroとはいえMaker Faireに自分が作品を出展する日が来るとは2年前には想像できませんでした。それまでは仕事以外ではんだ付けやプログラムをしたことなかったのですが、いったん自分のための電子工作やってみると面白すぎる。気付けばこんなところまで沼にはまっている。
初めての展示会出展、非常に貴重な経験でした。関係者の皆様ありがとうございました。 いつの日かTokyo Maker Faireに出れるくらいの作品を生み出せるよう精進します。
アノマロカリスロボ作成記
初めに
これまで動くものを作ったことはなかったのですが、スタックチャンを作るためにサーボモーターを購入し、そこから動くものへの工作意欲がわいてきました。勉強のため機構に関する書籍を探していたのですが、そこで出会った一冊がこちらです。
")
作成の記録
Tweitterで過程を紹介していたのでまとめます。
こちらの本に載っていた「古代生物アノマロカリスロボを作ろう」
— PikaPikaらいと (@KPmilk3) 2022年2月18日
CADで設計して3Dプリンターで作ってみました。
動くモノを作るの楽しい😆 https://t.co/oU7y8b2X1q pic.twitter.com/yL147NVGD0
アノマロカリスロボの中身。
— PikaPikaらいと (@KPmilk3) 2022年2月19日
チューチュートレインの動きと似てます🙂 pic.twitter.com/ELl3smqU5g
アノマロカリスロボ&LEDを3Dプリンターで作成してみました。 https://t.co/3Y6g4d1gt2 pic.twitter.com/32tDy7myZ8
— PikaPikaらいと (@KPmilk3) 2022年3月4日
アノマロカリスロボ改
— PikaPikaらいと (@KPmilk3) 2022年3月20日
歩いた?😅 pic.twitter.com/dY5LWE8BvD
3Dプリンターで作るアノマロカリスロボ。
— PikaPikaらいと (@KPmilk3) 2022年3月25日
初号機は組み立て性が酷かったですが、何回も作り直してみて、かなり改善できました。
もう少し作り込んだらデータ公開したいと思います。 pic.twitter.com/18btRU2U2Z
3Dプリンターで作るアノマロカリスロボ。
— PikaPikaらいと (@KPmilk3) 2022年3月26日
モーターではなく風車を使って動かすようにしてみました。試行錯誤して思いついたこの形は自分的にかなり達成感あります😁
基本の機構は、たなかじゅんさん @juntnk のこの本からのものです。https://t.co/6y0FkjHmA3 pic.twitter.com/1jjdP4mran
#アノマロカリスロボ
— PikaPikaらいと (@KPmilk3) 2022年5月5日
今日は海で遊んでます。
カメラだとプロペラ止まって見えますが、風が強くて実際はかなりの高速回転です。 pic.twitter.com/5tF5zSuuhm
機構のキモ
書籍の中ではコの字クランクで実現する方法を紹介されていますが3Dプリンタで作成するのは困難だったので、円柱を位相をずらして並べる構造にしました。
縦にプリントします
3Dデータ公開
データを公開しました。
アノマロカリスロボに興味を持ってもらった方はこのデータにとらわれずに、ぜひ自分なりの実現方法の模索やアレンジをして欲しいです。
github.com

泳がせてみた記録
最終的には泳がせたいです。現行品をお風呂で無理やり泳がせてみた結果・・・こいつ泳げます。
モーターを防水する方法を考えないと。
アノマロカリスロボ改
— PikaPikaらいと (@KPmilk3) 2022年4月11日
漕いでる?🚣♀️ pic.twitter.com/5zkc8YB6gw
アノマロカリスロボ
— PikaPikaらいと (@KPmilk3) 2022年4月16日
こいつ泳げるぞ🏊♂️ pic.twitter.com/ZtVLXMhuJk
ドット絵カメラシステムを作った
初めに
昨年末にLEDドット絵の世界に足を踏み入れました。
pikapikalight.hatenadiary.com
ドット絵のデータはExcelを駆使してそれなりに効率化できたのですが、それでもなかなか大変な作業でした。
カメラで撮った絵をリアルタイムでドット絵に変換できたら簡単にドット絵が作れて楽しそうと思い、挑戦してみました。
完成品
結論を先に。こんなのを作ることが出来ました。 youtu.be
ハードウェア
カメラはM5StackのUNIT-Vを使いました。以前こいつで色々やっていて、UNIT-VのMicroPythonはWS2812が動かせることを覚えていたのです。
pikapikalight.hatenadiary.com
ここで問題が一つ、UNIT-VのGroveコネクタは5V出せるのですが電流はほとんど流せない。とてもじゃないけど16x16=256個のLED点けることはできない。LEDパネルとUNIT-Vの電源を別々にとるしかないけれど、それだと配線がすっきりしない。
考えた末に閃きました。以前作成した「虹を投影する懐中電灯」と同じく、パネルの方に先に電源をつないでそこからコントローラーの方に電源をつなぐことで配線をすっきりさせる手法です。
 電源コネクタにはUSB-Cを、UNIT-Vとの接続にはGroveコネクタを使えるように改造しました。
電源コネクタにはUSB-Cを、UNIT-Vとの接続にはGroveコネクタを使えるように改造しました。

ソフトウェア
恥ずかしながらコードを公開します。
私はこれまでほとんどC言語しか使ったことがなく、このUNIT-Vで初めてPythonにふれました。正直、言語としての良さは理解できてません。
けれどたったこれだけのコードでこれが作れる事実はすごいなと思います。
import sensor, image, time, lcd from Maix import GPIO from modules import ws2812 from fpioa_manager import * fm.register(board_info.CONNEXT_A) class_ws2812 = ws2812(board_info.CONNEXT_A,256) while 1: try: sensor.reset() break except: time.sleep(0.1) continue sensor.set_hmirror(1) sensor.set_vflip(1) sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.B64X64) sensor.skip_frames(time = 1000) sensor.set_contrast(-2) sensor.set_saturation(2) sensor.set_auto_gain(True) sensor.run(1) r_num = 0 g_num = 0 b_num = 0 for i in range(10): a = class_ws2812.set_led(i,(10,10,10)) a=class_ws2812.display() img = sensor.snapshot() img2 = img.resize(1, 1) print(img2.get_pixel(0, 0)) r_num = r_num + img2.get_pixel(0,0)[0] g_num = g_num + img2.get_pixel(0,0)[1] b_num = b_num + img2.get_pixel(0,0)[2] time.sleep(0.1) print(r_num) print(g_num) print(b_num) rgb_ave = (r_num + g_num + b_num) / 3 print(rgb_ave) r_factor = rgb_ave / r_num g_factor = rgb_ave / g_num b_factor = rgb_ave / b_num print(r_factor) print(g_factor) print(b_factor) sensor.set_auto_gain(False,sensor.get_gain_db()) print(sensor.get_gain_db()) try: while(True): img = sensor.snapshot() img2 = img.resize(16, 16) img2 = img2.histeq() k = 0 sc = 5 for i in range(8): for j in range(16): rr = img2.get_pixel(i * 2, j)[0] * r_factor gg = img2.get_pixel(i * 2, j)[1] * g_factor bb = img2.get_pixel(i * 2, j)[2] * b_factor rr = int(rr) / sc gg = int(gg) / sc bb = int(bb) / sc rgb = (int(rr),int(gg),int(bb)) a = class_ws2812.set_led(k,rgb) k = k + 1 for l in range(16): rr = img2.get_pixel(i * 2 + 1, 15 - l)[0] * r_factor gg = img2.get_pixel(i * 2 + 1, 15 - l)[1] * g_factor bb = img2.get_pixel(i * 2 + 1, 15 - l)[2] * b_factor rr = int(rr) / sc gg = int(gg) / sc bb = int(bb) / sc rgb = (int(rr),int(gg),int(bb)) a = class_ws2812.set_led(k,rgb) k = k + 1 a=class_ws2812.display() time.sleep(0.1) except KeyboardInterrupt: pass
コードのポイント
sensor.set_framesize(sensor.B64X64)
framesizeを正方形にしておくことで16x16に変換したときに歪まないようになります。
sensor.set_contrast(-2) sensor.set_saturation(2)
こうしたほうがなんとなく色がくっきりするような気がしたのでこうしてますが、気のせいである可能性大です。
r_num = 0
g_num = 0
b_num = 0
for i in range(10):
a = class_ws2812.set_led(i,(10,10,10))
a=class_ws2812.display()
img = sensor.snapshot()
img2 = img.resize(1, 1)
print(img2.get_pixel(0, 0))
r_num = r_num + img2.get_pixel(0,0)[0]
g_num = g_num + img2.get_pixel(0,0)[1]
b_num = b_num + img2.get_pixel(0,0)[2]
time.sleep(0.1)
print(r_num)
print(g_num)
print(b_num)
rgb_ave = (r_num + g_num + b_num) / 3
print(rgb_ave)
r_factor = rgb_ave / r_num
g_factor = rgb_ave / g_num
b_factor = rgb_ave / b_num
起動時にホワイトバランスを補正するシーケンスです。起動時に白いものにカメラを向けて補正値を算出することで色の再現性を上げられないかと考えたコードです。本当は16x16個分の補正値を出した方がいいんでしょうが、そこまでやってません。 img.resize(1, 1)で1画素データにしてしまってそのRGBの補正値を出しています。この辺、今後の検討課題です。
sensor.set_auto_gain(False,sensor.get_gain_db())
auto_gainをFalseにするのは必須です。これをしないとチカチカしちゃいます。
img2 = img.resize(16, 16)
カメラの画像を16x16にするたった一行の呪文です。
k = 0
sc = 5
for i in range(8):
for j in range(16):
rr = img2.get_pixel(i * 2, j)[0] * r_factor
gg = img2.get_pixel(i * 2, j)[1] * g_factor
bb = img2.get_pixel(i * 2, j)[2] * b_factor
rr = int(rr) / sc
gg = int(gg) / sc
bb = int(bb) / sc
rgb = (int(rr),int(gg),int(bb))
a = class_ws2812.set_led(k,rgb)
k = k + 1
for l in range(16):
rr = img2.get_pixel(i * 2 + 1, 15 - l)[0] * r_factor
gg = img2.get_pixel(i * 2 + 1, 15 - l)[1] * g_factor
bb = img2.get_pixel(i * 2 + 1, 15 - l)[2] * b_factor
rr = int(rr) / sc
gg = int(gg) / sc
bb = int(bb) / sc
rgb = (int(rr),int(gg),int(bb))
a = class_ws2812.set_led(k,rgb)
k = k + 1
sc = 5 はRGB値を5分の一に下げて、明るさ=消費電流を下げる処置です。 16個ごとに逆転させているのは使用したLEDパネルがそういう並びのものだったからです。
完成
スナフキンのフィギュアがいい感じに出たときは感動しました。




